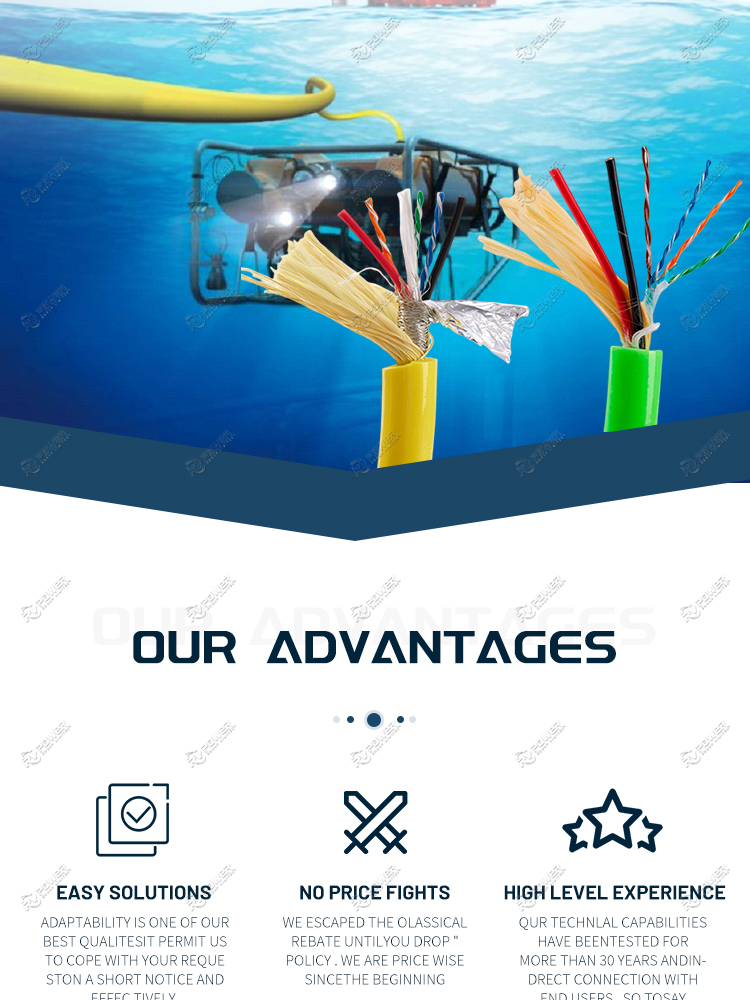
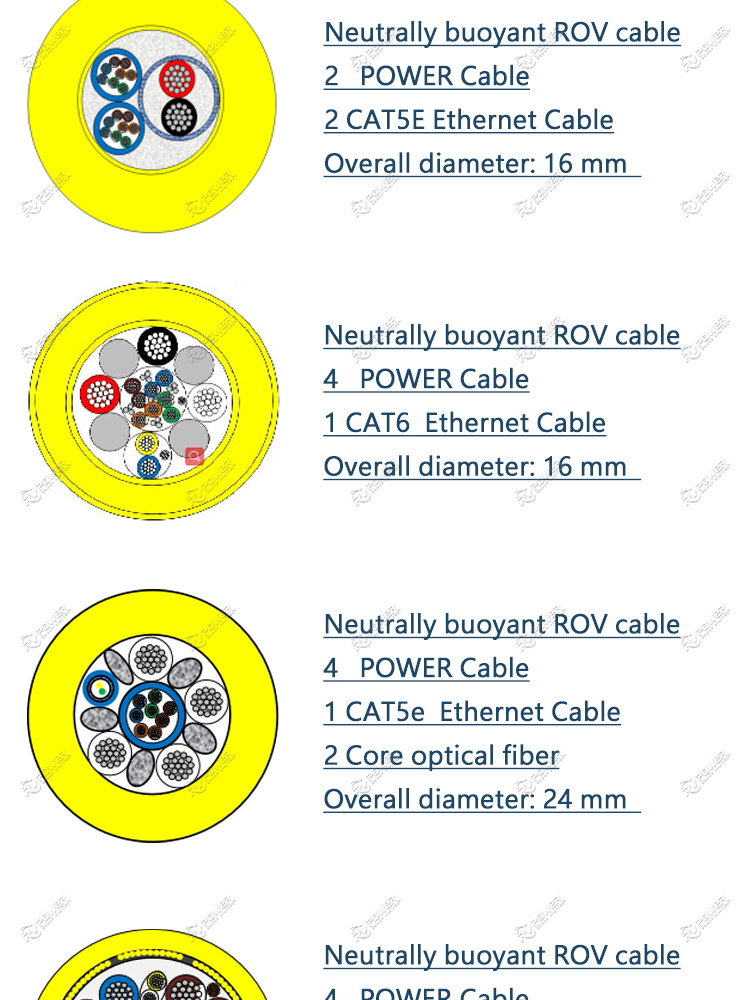
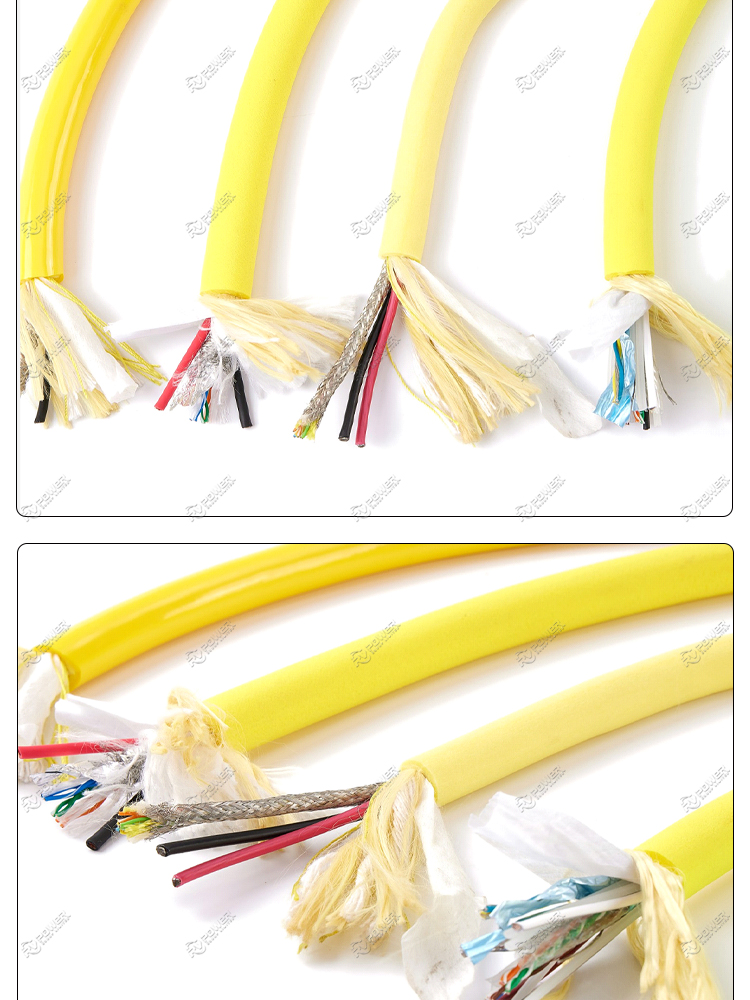
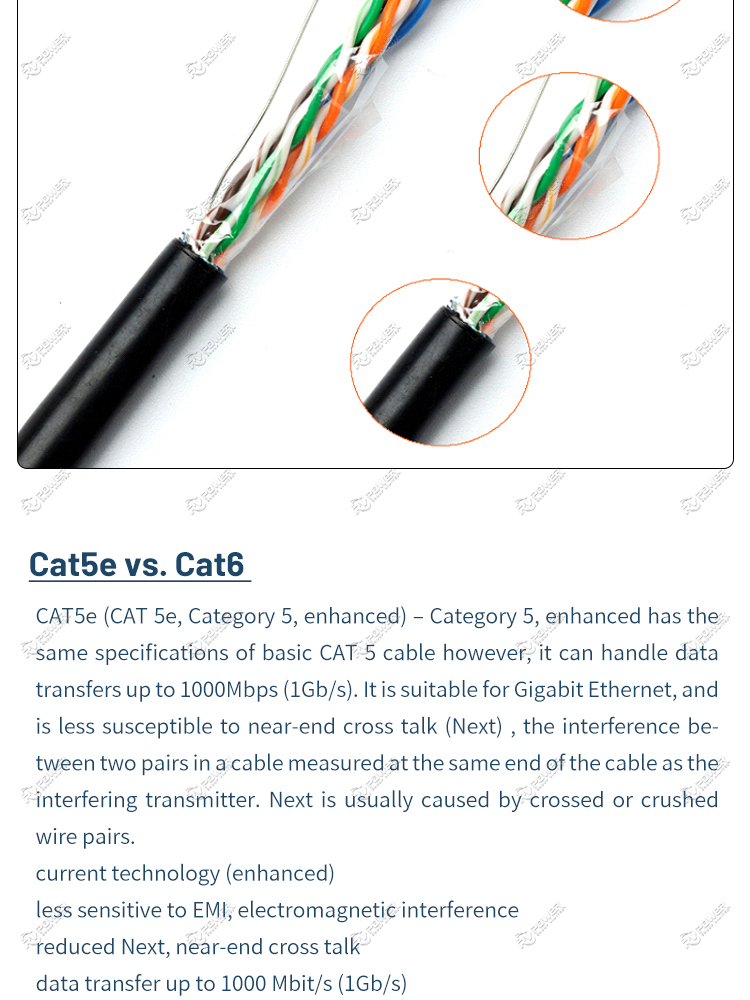
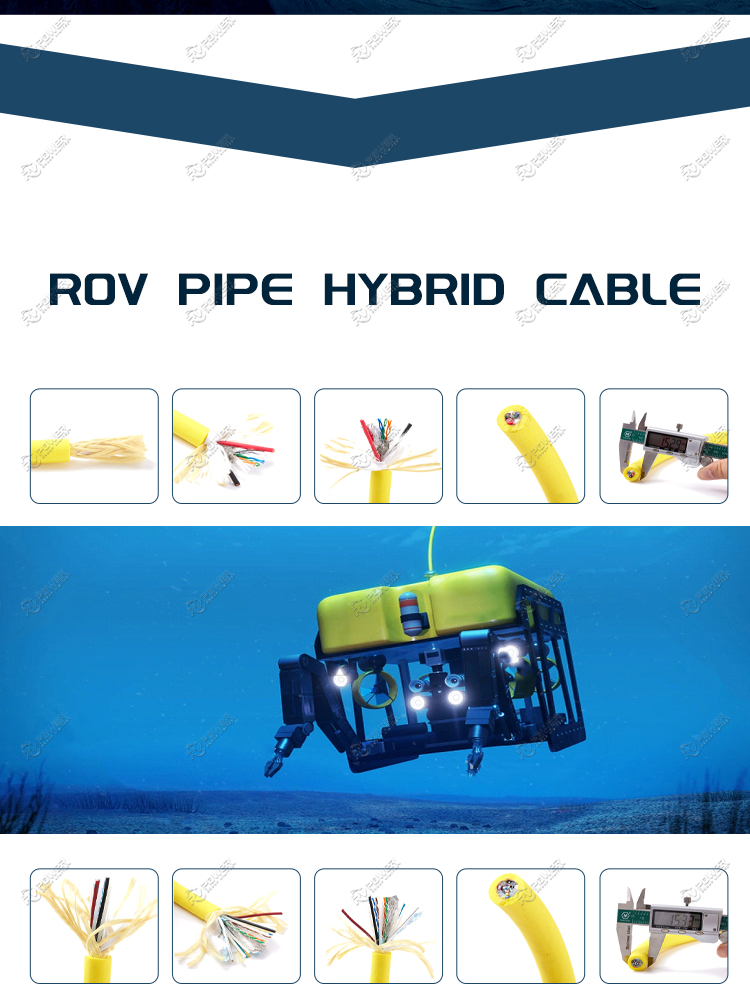
Neutral Buoyant CAT6 Control Cables Underwater ROV Umbilical Tether for ROV Vehicles — neutrally buoyant ROV Ethernet hybrid tether combining Cat5e/Cat6 Gigabit network and power conductors in one foam PUR cable. Gigabit IP camera and sensor data, 300V–600V power. Kevlar reinforced. For IP-based ROV systems, underwater drones, and research vessels.
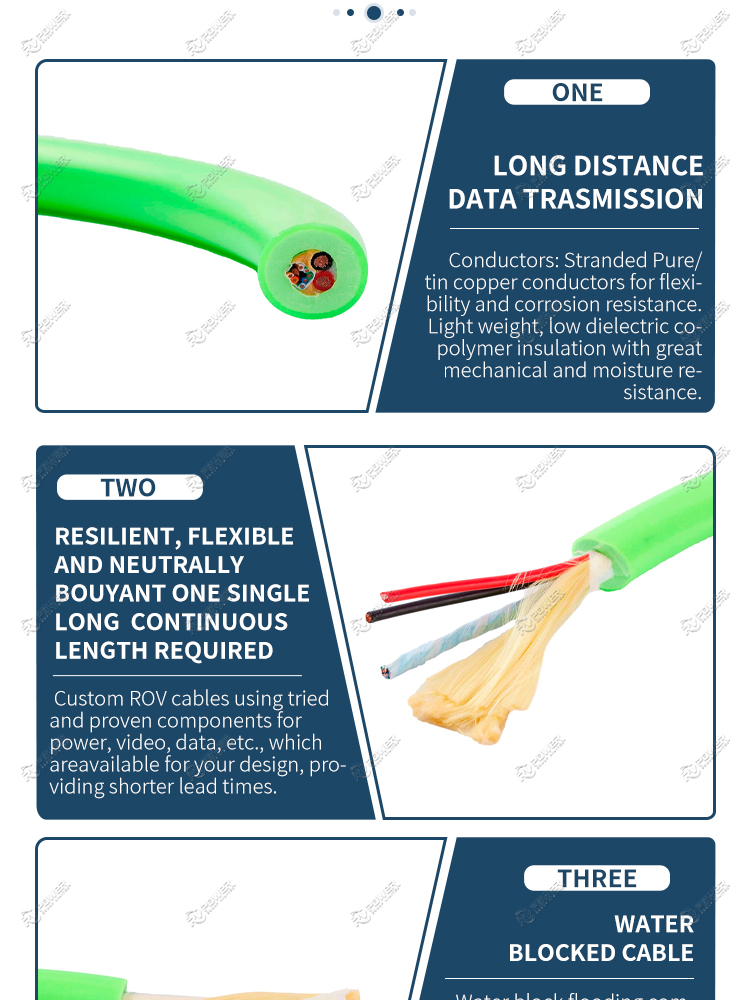
This Neutral Buoyant CAT6 Control Cables Underwater ROV Umbilical Tether for ROV Vehicles is the tether of choice for modern IP-based ROV systems — combining Cat5e or Cat6 Gigabit Ethernet with power conductors in a single neutrally buoyant foam PUR cable. As ROV camera systems migrate from analogue to HD IP, and as onboard computing platforms add real-time sonar processing, SLAM navigation, and AI-based inspection capabilities, the bandwidth demands of the tether data link grow correspondingly — making Gigabit Ethernet an essential tether specification for current and next-generation vehicle designs.
Our ROV Ethernet hybrid cables maintain TIA/EIA-568B Ethernet parameters at operating depth through waterblocked pair construction, providing reliable 1,000 Mbps Gigabit connections alongside 300–600V power delivery in a single cable that minimises tether drag and simplifies shipboard cable management.
| Parameter | Cat5e Hybrid | Cat6 Hybrid | Cat6 + Fibre Hybrid |
|---|---|---|---|
| Ethernet Standard | Cat5e (1,000 Mbps) | Cat6 (1,000 Mbps) | Cat6 + 1× SM fibre (10 Gbps) |
| Data Pairs | 4-pair 24AWG | 4-pair 23AWG | 4-pair 23AWG + 1× SM |
| Extra Signal Pairs | 0–2 STP 24AWG | 0–2 STP 24AWG | 0–1 STP 24AWG |
| Power Cores | 2–4×18–14AWG 300V | 2–4×14–12AWG 300–600V | 2–4×12–10AWG 600V |
| Buoyancy | Neutral ±0.05 kg/m | Neutral ±0.05 kg/m | Neutral or positive |
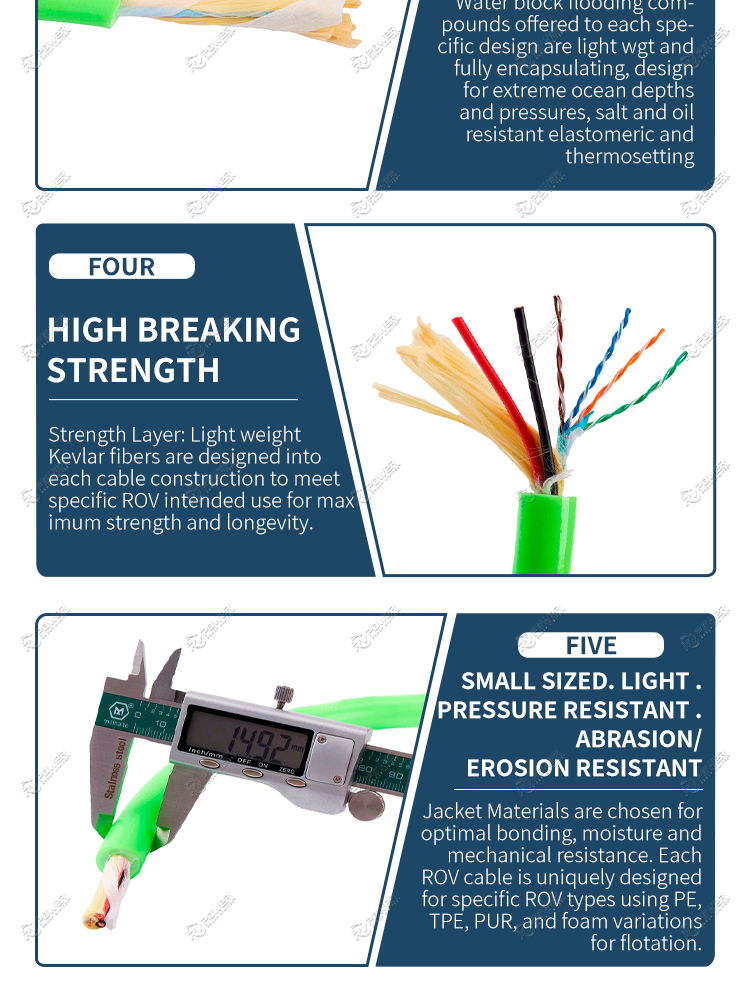
| Break Strength | 500–1,500 kg Kevlar | 800–2,000 kg Kevlar | 2,000–2,500 kg |
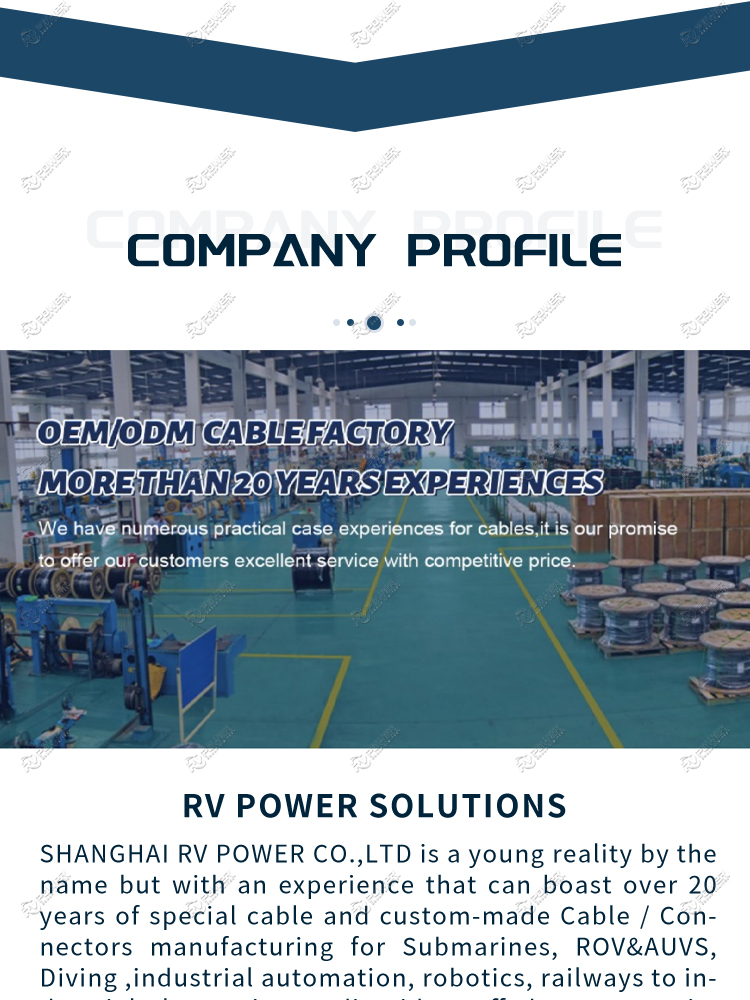
| Jacket | Foam PUR double | Foam PUR double | Foam PUR double |
| OD Range | 14–20 mm | 16–24 mm | 22–30 mm |
| Temperature | -25°C to +85°C | -25°C to +85°C | -25°C to +85°C |
| Depth Rating | 300–500 m | 500–1,000 m | 1,000 m+ |
H.264-compressed 1080p30 video requires 8–15 Mbps. H.265 compressed 4K30 requires 25–40 Mbps. Uncompressed 1080p60 requires 3 Gbps. Even moderate-quality H.265 compressed 4K video from two ROV cameras simultaneously requires 50–80 Mbps sustained — only achievable on a Gigabit Ethernet tether. RS-485 or 100 Mbps Fast Ethernet is completely inadequate for dual-camera 4K ROV operations.
Modern imaging sonars (BlueView, Imagenex, Tritech) generate 1–10 Mbps raw data streams. USBL acoustic positioning systems generate 100 kbps. DVL navigation generates 50 kbps. Running all these simultaneously alongside camera video requires 20–100 Mbps total — Cat6 Gigabit tethers provide ample headroom for all payload data streams without compression or rate-limiting.
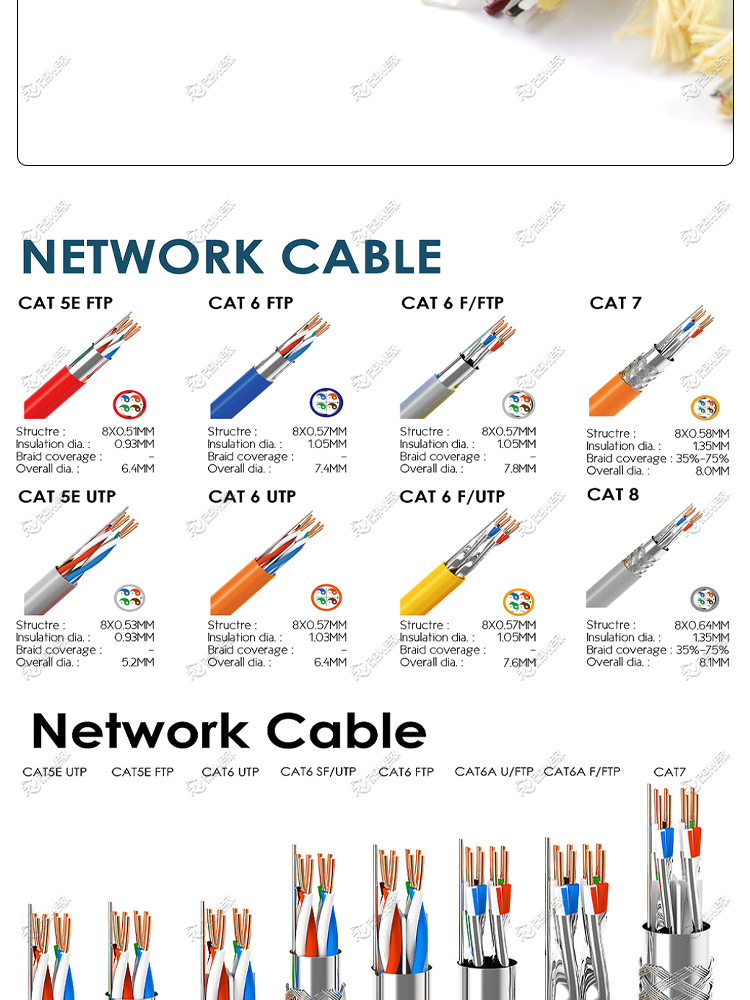
Cat5e supports 1 Gbps to 100 m cable length. Cat6 supports 1 Gbps to 100 m with superior noise margin. At 200 m tether length, Cat5e degrades to 100 Mbps Fast Ethernet. Cat6 maintains 1 Gbps to longer distances because of tighter twist pitch tolerances and improved NEXT characteristics. For ROV tethers over 100 m operating depth, Cat6 is strongly recommended to maintain full Gigabit bandwidth at vehicle depth.
Running separate power and Ethernet cables doubles connector count, increases tether diameter and drag, and creates tether management complexity on the drum. Our power + Ethernet hybrid eliminates a complete cable run — saving 30–50% of tether bundle diameter, reducing drag by a factor proportional to the square of diameter reduction, and halving connector-related failure risk per dive.
| Model | Ethernet | Extra Data | Power | BS (kg) | OD (mm) |
|---|---|---|---|---|---|
| Cat5e + 2P power | Cat5e 4-pair | None | 2×18AWG 300V | 500–1,000 | 14–18 |
| Cat6 + 4P power | Cat6 4-pair | None | 4×14AWG 300V | 800–1,500 | 18–22 |
| Cat6 + 1SP + 2P | Cat6 4-pair | 1×STP 24AWG | 2×16AWG 300V | 800–1,200 | 18–22 |
| Cat6 neutral buoyant | Cat6 4-pair STP | None | 2×14AWG 300V | 1,000 | 16–20 |
| Cat6 double-jacket | Cat6 4-pair | None | 4×12AWG 600V | 1,500–2,000 | 22–28 |
| Cat6 + SM fibre | Cat6 4-pair | 1× SM fibre | 4×10AWG 600V | 2,000–2,500 | 26–32 |
| Floating research | Cat5e/Cat6 | Optional RS-485 | 2×16AWG 300V | 800 | 18 |
Before each ROV dive, perform a cable link-speed test at the full tether length — verify that the link negotiates at 1000BASE-T (Gigabit) rather than falling back to 100BASE-TX (Fast Ethernet). A fallback to 100 Mbps indicates one or more of the four pairs has failed (Gigabit requires all four pairs; Fast Ethernet uses only two) — this must be diagnosed and repaired before the dive as full camera and sonar functionality requires Gigabit bandwidth.
If the ROV system uses Power over Ethernet (PoE or PoE+) for camera or sensor power — note that PoE+ provides up to 30W at 48V over the Ethernet pairs in addition to data. Our Cat6 cores are rated for PoE+ use with a maximum of 0.3A per conductor at 48V. Do not use PoE++ (90W, 4-pair power) on hybrid tethers without confirming power conductor current ratings — the combined current from PoE++ and separate power conductors may exceed jacket temperature limits.
Neutrally buoyant tethers are more compliant than armoured cables and benefit from wider drum flanges and level-wind mechanisms to prevent layer displacement during high-speed deployment. When deploying at speeds above 0.5 m/s, use a cable brake to maintain light back-tension on the drum — this keeps each layer under slight tension as it spools, preventing the loose loops that cause level-wind tracking errors and cable kinking on the drum barrel.
Specify Ethernet standard (Cat5e/Cat6), power core count and AWG, optional signal pairs or fibre, buoyancy, break strength, and depth rating — we engineer the exact Gigabit ROV tether for your vehicle and mission.
Gigabit Cat6 | Power + data | Neutrally buoyant | Kevlar reinforced | Custom lengths