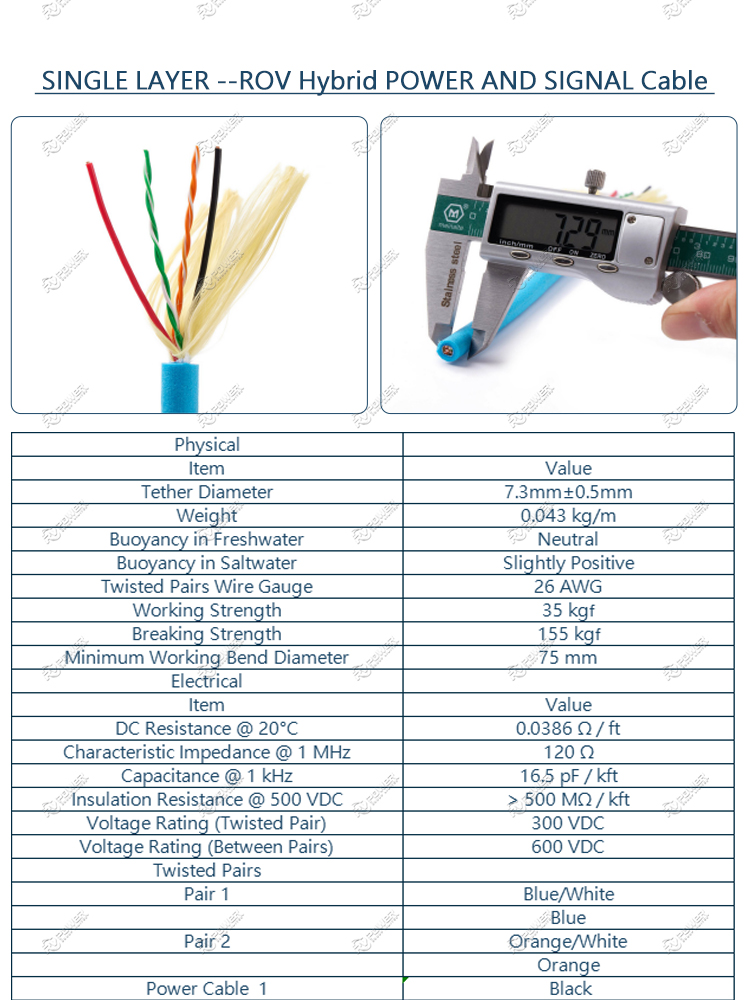
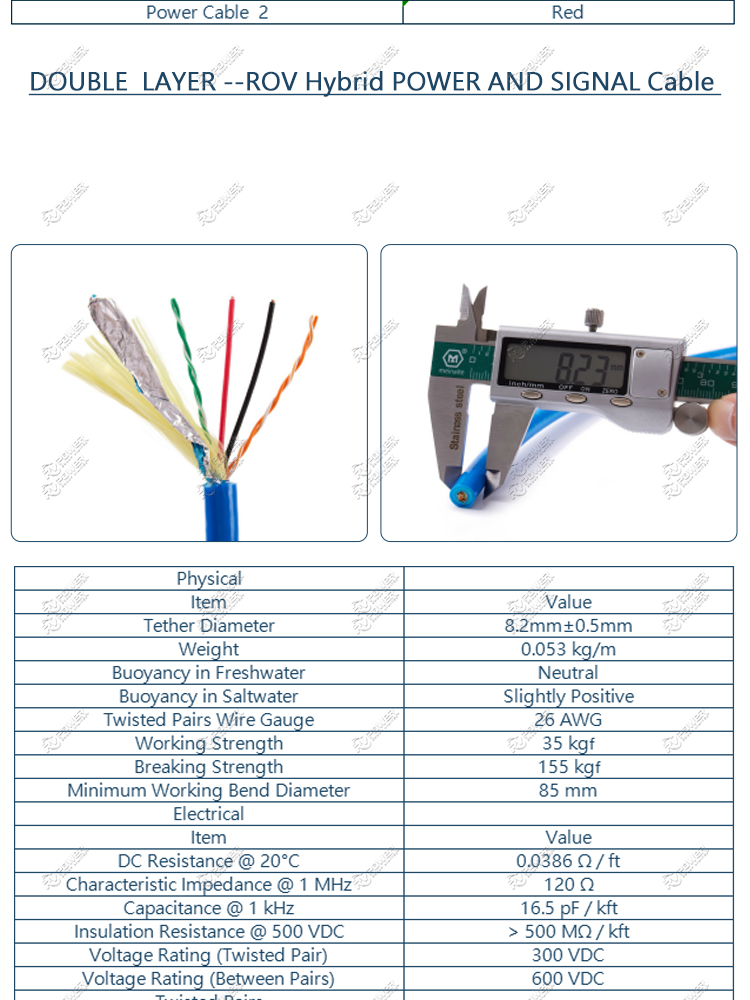
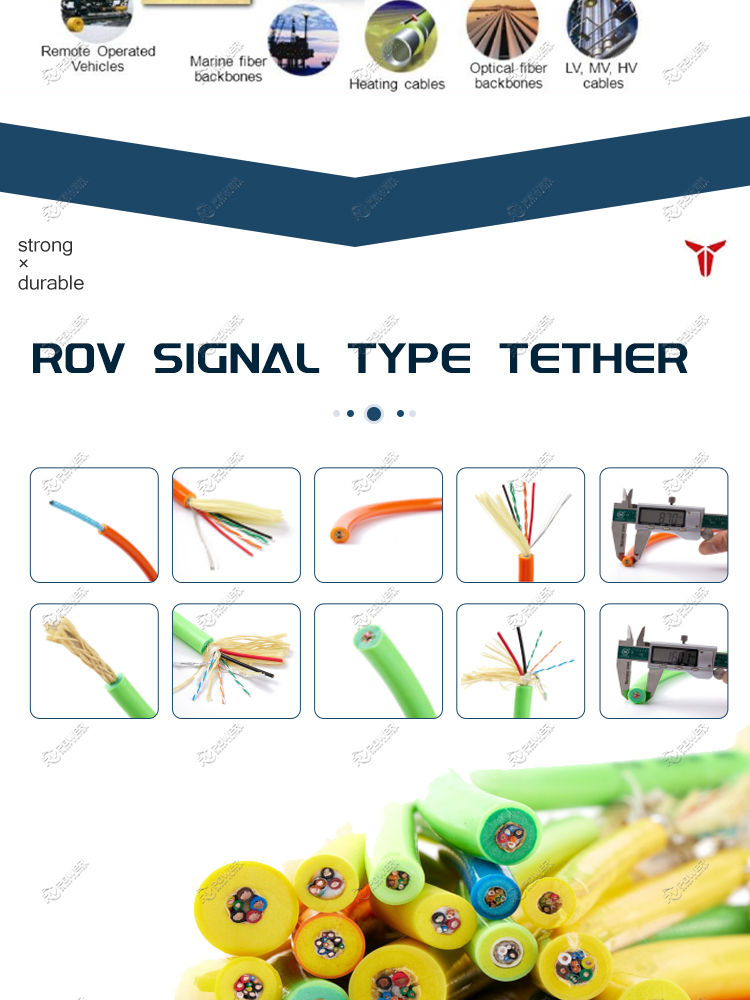
Flexible 2 Core Power Wires and 2 Pairs Signal Wires ROV Cable — ROV hybrid umbilical combining power conductors and shielded signal pairs (RS-485, twisted pair) in one neutrally buoyant PUR-jacketed cable. Kevlar reinforced, foam PUR buoyancy. For observation ROV, underwater vehicle control, and offshore power/data umbilicals.
This Flexible 2 Core Power Wires and 2 Pairs Signal Wires ROV Cable combines high-current power conductors with shielded signal pairs in a single hybrid ROV umbilical — delivering both propulsion power and bidirectional control data through one cable. This integrated approach eliminates the need for separate power and data tethers on the same ROV deployment, reducing total tether diameter, hydrodynamic drag, and subsea connector count.
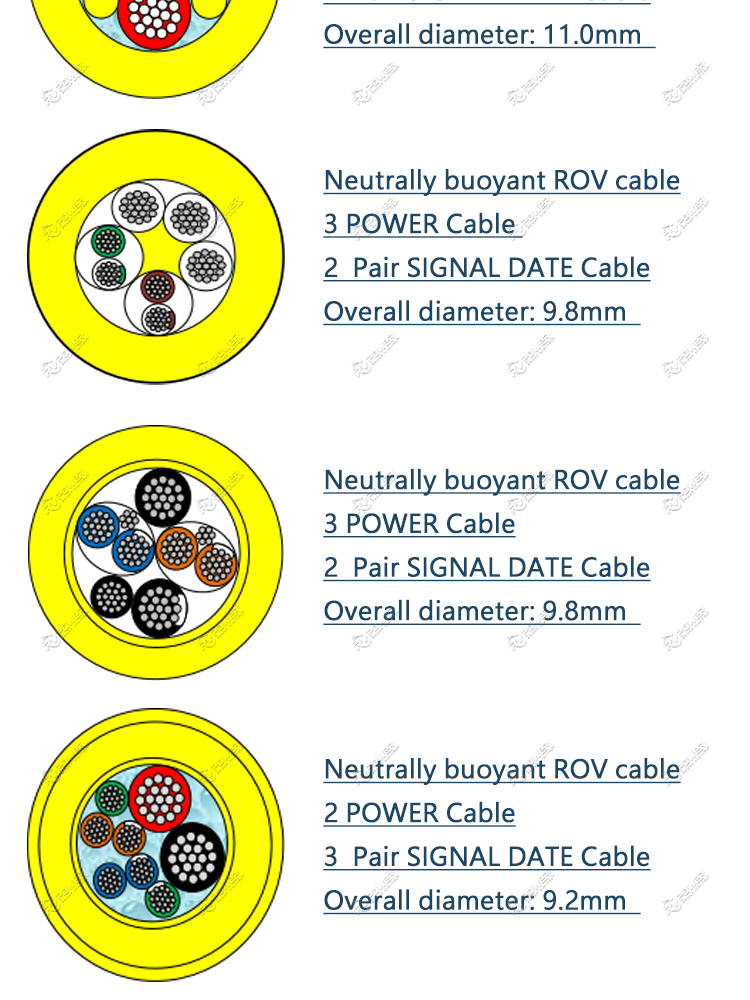
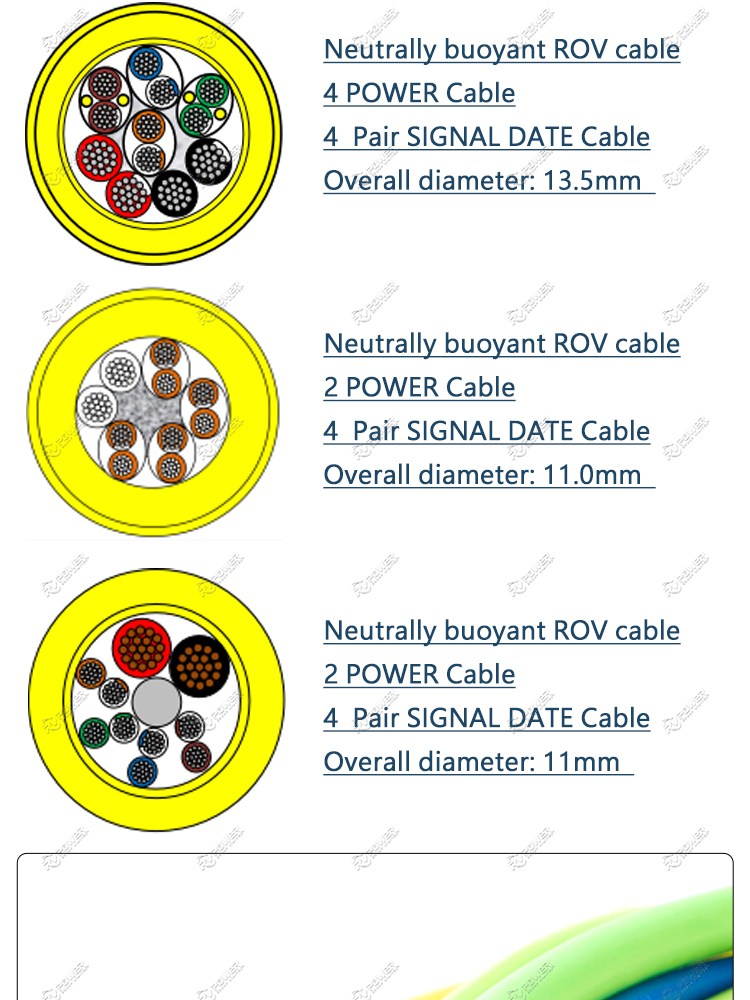
The power cores — typically 2 to 4 conductors at 14–22 AWG, rated 300V to 600V — supply thruster motors, lighting, and actuators. The shielded signal pairs (individually screened with Al/mylar + drain wire) carry RS-485 bus control, analogue sensor data, and communication signals between the surface control unit and vehicle. Both sections share a thermoset elastomeric waterblock core and a flexible foam PUR outer jacket providing neutral or positive buoyancy in seawater.
| Parameter | Light Hybrid | Standard Hybrid | Heavy Hybrid |
|---|---|---|---|
| Power Cores | 2×20–18AWG 300V | 2–4×16–14AWG 300V | 4×14–12AWG 600V |
| Signal Pairs | 1–2 STP 24AWG | 2–3 STP 22–24AWG | 3–5 STP 20–22AWG |
| Signal Protocol | RS-485 / RS-232 | RS-485 + analogue | RS-485 + RS-232 + 4–20mA |
| Shield (per pair) | Al/mylar + drain | Al/mylar + drain | Al/mylar + drain + overall braid |
| Jacket | Foam PUR single | Foam PUR double | Foam PUR double + armour |
| Buoyancy | Neutral/positive | Neutral | Neutral |
| Break Strength | 500–800 kg | 800–1,500 kg | 1,500–2,000 kg |
| OD Range | 10–14 mm | 14–20 mm | 20–28 mm |
| Temperature | -25°C to +85°C | -25°C to +85°C | -25°C to +85°C |
| Depth Rating | 300 m | 500 m | 1,000 m |
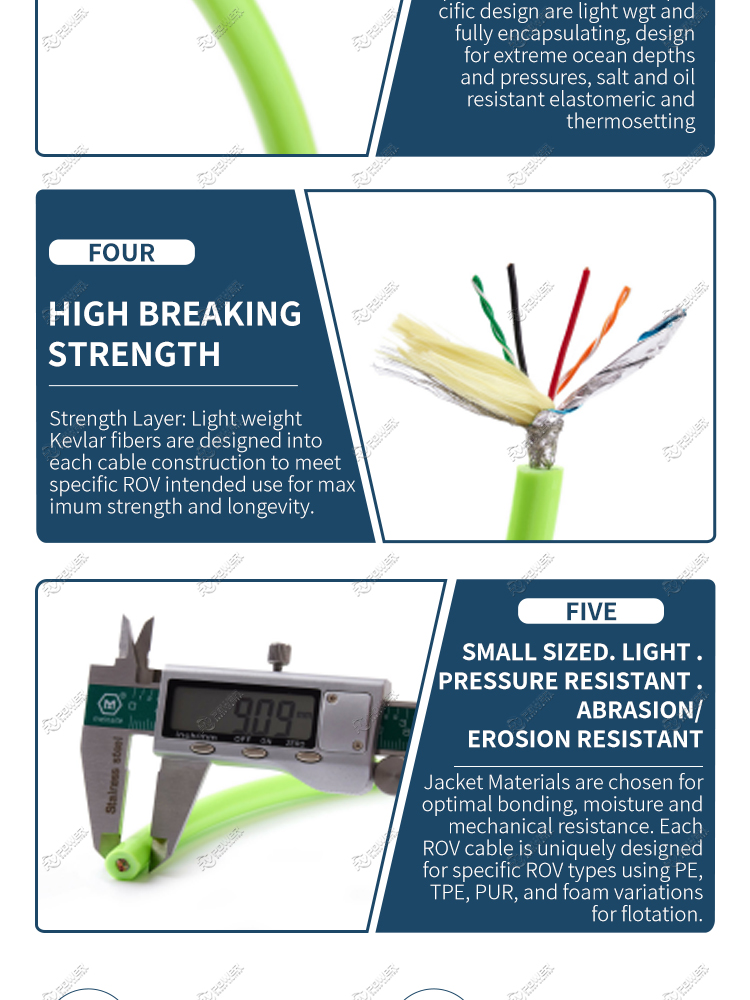
The principal concern with combining power and signal in one cable is conducted EMI from power conductors coupling into signal pairs. Our per-pair aluminium/mylar shielding with tinned copper drain wire provides a dedicated low-impedance return path for common-mode interference currents induced by thruster motor PWM switching — achieving greater than 40 dB common-mode rejection at RS-485 data frequencies, ensuring error-free communication under full thruster load.
RS-485 is the standard protocol for ROV vehicle control buses — it operates reliably over cable lengths to 1,200 m at 115.2 kbps, requires only one twisted pair per bus, and is inherently multi-drop (one master, up to 32 nodes). RS-485 is more robust than Ethernet in noise-rich ROV environments and requires less processing overhead on embedded vehicle controllers — making it the preferred protocol for thruster drive and sensor control even as Ethernet is used for high-bandwidth payload data.
Single-jacket foam PUR cables lose their surface abrasion resistance quickly in rocky seafloor or abrasive sand environments — foam cells exposed at the jacket surface absorb water and collapse, locally increasing cable density and shifting buoyancy. Our double-jacket construction places a dense abrasion-resistant PUR outer layer over the foam buoyancy layer — the foam remains protected from abrasion, water absorption, and biological attack throughout the cable service life.
| Model | Power | Signal | Buoyancy | BS (kg) | OD (mm) |
|---|---|---|---|---|---|
| 2P+1SP light | 2×18AWG 300V | 1×STP 24AWG | Neutral | 500 | 10 |
| 2P+2SP standard | 2×16AWG 300V | 2×STP 24AWG | Neutral | 800 | 14 |
| 2P+3SP signal-heavy | 2×14AWG 300V | 3×STP 22AWG | Neutral | 1,000 | 16 |
| 4P+2SP power-heavy | 4×14AWG 600V | 2×STP 20AWG | Neutral | 1,500 | 22 |
| 5801 compatible | 4×18AWG | 4×STP 24AWG | Neutral | 1,000 | 18 |
| Red hi-vis hybrid | 4×16AWG 300V | 2×STP screened | Positive | 800 | 16 |
| TPU chemical-resist | 2×14AWG 300V | 2×STP 24AWG | Neutral | 800 | 16 |
| Heavy 3-sheath | 4×12AWG 600V | 3×STP 20AWG + Cat6 | Neutral | 2,000 | 28 |
RS-485 buses in ROV hybrid tethers must be terminated at both the topside control unit and the vehicle RS-485 controller with the characteristic impedance of the signal pair (typically 120 Ohm). Missing or incorrect termination causes signal reflections that corrupt data at baud rates above 9,600 bps on tether lengths over 50 m. Verify termination resistance with a multimeter before first deployment — the bus should read 60 Ohm between the two signal conductors when both terminators are installed and the bus is otherwise disconnected.
The hybrid tether-to-vehicle connector carries both power and signal pins — intermixing high-current power and low-level signal in one housing. Ensure the connector body includes internal power/signal pin isolation, and that power and signal grounds are connected at a single chassis point only to prevent ground loop noise injection into the signal pairs. After each dive, inspect the connector mating face for salt deposits on signal pin contacts — even micro-ohm resistance increases on signal pins can cause RS-485 communication errors at depth.
Perform annual electrical verification: Hi-Pot test power conductors to 1.5× rated voltage (450V for 300V cores); measure insulation resistance on each power core (>100 MΩ at 500 VDC); measure DC loop resistance on each signal pair (verify against baseline); and conduct RS-485 communication test at maximum baud rate over full tether length. Any deviation from baseline measurements indicates the section of cable to inspect or replace before next deployment season.
Specify power core count and AWG, signal pair count and protocol (RS-485/analogue), buoyancy, break strength, and operating depth — we supply the exact hybrid umbilical for your ROV system.
RS-485 + power | Foam PUR buoyancy | Kevlar 500–2,000 kg | Custom lengths